ROBOT LÀ GÌ?
Gần đây, robot đã mở rộng sự hiện diện không chỉ trong công nghiệp mà còn các lĩnh vực khác bằng cách tăng tốc độ, cải thiện độ chính xác, phản ứng với các chuyển động phức tạp và tăng cường các chức năng an toàn để cùng tồn tại với con người. Sự phát triển của robot tham gia tích cực vào các lĩnh vực gần gũi hơn với con người sẽ tiếp tục tiến bộ trong tương lai.
Các thành phần của robot
Một robot công nghiệp bao gồm "cánh tay rô bốt" di chuyển và thực hiện các nhiệm vụ, “bộ điều khiển” hoạt động và điều khiển thao tác và “bộ lập trình” dạy chuyển động của cánh tay rô bốt. Yaskawa Electric phát triển và sản xuất tất cả các thành phần cốt lõi này.

Các thành phần của robot
Cấu tạo và đặc điểm của robot công nghiệp
Robot công nghiệp là gì?
Theo Tiêu chuẩn Công nghiệp Nhật Bản (JIS), Robot công nghiệp được định nghĩa là “máy có các tính năng thao tác hoặc chức năng di động được điều khiển tự động, có thể thực hiện các nhiệm vụ khác nhau thông qua một chương trình và được sử dụng cho mục đích công nghiệp”. Nói cách khác, robot công nghiệp được định nghĩa không phải theo hình dạng mà theo các chức năng của chúng.
Robot công nghiệp được sử dụng để làm gì?


Robot công nghiệp
Mục đích của rô bốt công nghiệp là lặp đi lặp lại hành động “di chuyển nhanh chóng và hiệu quả các công cụ chung thích hợp cho một nhiệm vụ cụ thể đến vị trí cho nhiệm vụ đó”. Ví dụ, trong hoạt động hàn hồ quang, mỏ hàn được gắn vào đầu của rô bốt được yêu cầu di chuyển nhanh chóng và chính xác đến vị trí hàn từ khi bắt đầu công việc hàn đến vị trí khi kết thúc. Với công việc gắp vật, một công cụ để lấy các vật phẩm được gắn vào đầu rô-bốt sẽ được di chuyển đến vị trí đặt các vật phẩm, nhặt chúng lên và di chuyển chúng đến một vị trí được chỉ định một cách nhanh chóng và chính xác.
Các loại và đặc điểm của robot công nghiệp
Cấu tạo của rô bốt sẽ khác nhau tùy thuộc vào yếu tố nào quan trọng với ứng dụng của nó, đó là tốc độ, độ chính xác hay bề rộng.
Hãy để chúng tôi giới thiệu về đặc điểm của chúng.
Robot Descartes

Robot Descartes
Robot descartes có cấu trúc đơn giản gồm hai hoặc ba trục trượt trong đó các trục trượt được nối với nhau. Mặc dù chúng không thể thực hiện các chuyển động phức tạp, nhưng độ chính xác của chúng cao và dễ điều khiển, làm cho chúng thích hợp để sử dụng trong các lĩnh vực bán dẫn, chăm sóc sức khỏe hoặc hóa chất cho các nhiệm vụ như lắp ráp các bộ phận nhỏ hoặc trang bị mạch điện tử .
Robot hình trụ


Robot hình trụ
Robot hình trụ bao gồm các cấu trúc lần đầu tiên được sử dụng cho robot công nghiệp trong những năm đầu. Tuy lĩnh vực hoạt động rộng nhưng chúng không phù hợp lắm với những công việc phức tạp đòi hỏi chúng phải di chuyển vòng vèo. Cánh tay của Robot hình trụ quay theo chiều dọc và mở rộng và co lại từ trục quay.
Robot có khớp nối theo chiều dọc và chiều ngang


Robot có khớp nối theo chiều dọc và chiều ngang
Robot có khớp nối theo chiềudọc: Các robot này có nhiều khớp (trục), các khớp và liên kết được kết nối theo hình thức vuông góc như một sự sắp xếp nối tiếp và các đầu của cánh tay di chuyển trong một phạm vi rộng dọc theo một mặt phẳng nằm ngang.
Robot có khớp nối theo chiều ngang: Các robot này có nhiều khớp (trục), các khớp và liên kết được kết nối theo hình thức vuông góc như một sự sắp xếp nối tiếp và các đầu của cánh tay di chuyển trong một phạm vi rộng dọc theo một mặt phẳng thẳng đứng.
Nhiều khớp của Robot khớp ngang và Robot khớp theo chiều dọc được kết nối với nhau thông qua các liên kết, mỗi khớp sẽ tạo ra chuyển động quay xung quanh các khớp. Số lượng khớp càng nhiều thì mức độ tự do càng lớn, giúp các robot này có thể thực hiện các chuyển động phức tạp kể cả di chuyển vòng vèo. Bởi vì điều này, nhiều robot ngày nay có nhiều khớp. Cấu tạo của rô bốt khớp dọc tương tự như cánh tay của con người, điều này có thể nói rằng chúng có lẽ là hình thức rô bốt hợp lý nhất để sử dụng cho công việc được thực hiện “thay cho con người”.
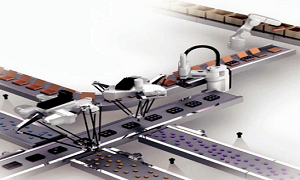
Robot liên kết song song

Robot liên kết song song
Robot có cấu trúc bao gồm nhiều trục (động cơ) ở đầu của chúng chuyển động song song được gọi là robot liên kết song song. Trong khi phạm vi chuyển động của chúng bị hạn chế về mặt vật lý so với Robot liên kết nối tiếp, năng lượng được sử dụng bởi nhiều động cơ ở chân đế, dẫn đến khả năng chịu tải lớn hơn và tốc độ cực cao. Các đầu của Robot liên kết song song được di chuyển đồng thời song song theo nhiều trục.
Nguồn: Yaskawa
Liên hệ để được tư vấn chi tiết:
BẢO AN AUTOMATION - CÔNG TY CỔ PHẦN DỊCH VỤ KỸ THUẬT BẢO AN
- Địa chỉ: Khu dự án Vân Tra B – An Đồng – An Dương – Hải Phòng
- Hotline: 0936.985.256
- Email: baoan@baoanjsc.com.vn
- Website: https://baoanjsc.com.vn
- Fanpage: https://www.facebook.com/BaoAnAutomation
Bài viết bạn nên xem:
Thông tin liên hệ:
Hòm thư daipq@baoanjsc.com.vn
Hoặc số điện thoại 0936592556
8.127
31/08/2021
Web số dành cho sinh viên
Nhóm chủ đề