CÁC DẠNG CẤU TẠO CỦA HỆ TRUYỀN ĐỘNG ĐIỀU KHIỂN (HỆ SERVO)
CÁC DẠNG CẤU TẠO CỦA HỆ TRUYỀN ĐỘNG ĐIỀU KHIỂN (HỆ SERVO)
1.1 Các dạng cấu tạo của hệ truyền động điều khiển (hệ Servo)
- Động cơ ĐK có dạng dài thanh mảnh
- Tích hợp thiết bị ĐK (biến tần) với động cơ vào cùng một nhánh TĐ
- Tích hợp khâu đo tốc độ quay và đo vị trí vào động cơ ĐK (tiết kiệm không gian và thuận lợi về giá)
- Động cơ ĐK có dạng dài thanh mảnh
- Tích hợp thiết bị ĐK (biến tần) với động cơ vào cùng một nhánh TĐ
- Tích hợp khâu đo tốc độ quay và đo vị trí vào động cơ ĐK (tiết kiệm không gian và thuận lợi về giá)

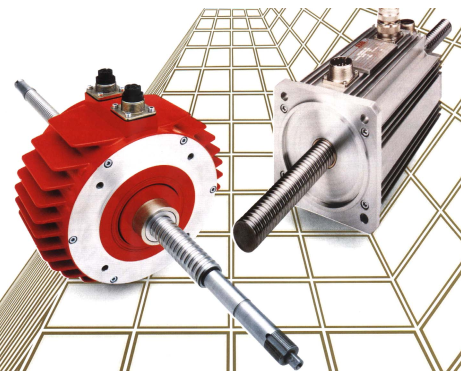
Hình 1.1 : Động cơ ĐK và thiết bị ĐK tích hợpthành một đơn vị thống nhất
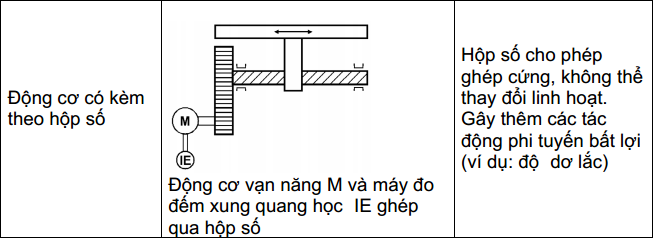
1.1.1 Ghép phần cơ với động cơ điều khiển
1.2. Một số đòi hỏi khác về kết cấu đối với hệ TĐ Servo:
- Thoát nhiệt tốt kể cả ở trạng thái đứng im (dự kiến sẵn làm mát độc lập)
- Ngăn ngừa truyền nhiệt qua trục động cơ tới đối tượng TĐ (tới phụ tải)
(đòi hỏi về cấp chính xác đối với máy công cụ, động cơ KĐB bất lợi với vai trò
động cơ ĐK vì có tổn thất lớn trong Rotor)
- Sự đồng đều của chuyển động (trước hết ở tốc độ quay nhỏ)
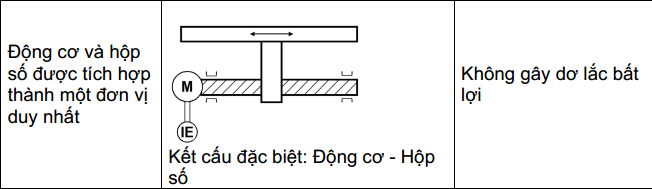
- Tích hợp động cơ ĐK trực tiếp vào đối tượng TĐ (kết cấu gọn, bền)
- Tích hợp khâu đo tốc độ quay và vị trí vào động cơ ĐK (tiết kiệm không gian và hạ giá thành)

Hình 1.2:Tích hợp động cơ và cảm biến đo vị trí, đo tốc độ quay (nhỏ gọn và giá thành hạ)
Hình 1.3:Tích hợp động cơ ĐK và trục vít bi thành hệ TĐ tuyến tính giả
Các giải pháp ưu tiên là động cơ ĐK loại MC và XC3P có kích thích bằng nam
châm vĩnh cửu vì chúng ít phát nhiệt.
- Nhờ các phương pháp ĐC hiện đại đối với máy điện trường quay, ngày nay chủ yếu động cơ ĐK loại XC3P đồng bộ được sử dụng, nuôi bởi nghịch lưu (NL nguồn áp hay nguồn dòng), trong khi đó động cơ ĐK loại MC được nuôi bằng các bộ băm xung MC.
- Một dạng động cơ đặc biệt là động cơ từ kháng ĐK đóng ngắt (SwitchedReluctance-(SR)-Motor).
- Khi chỉ cần mômen quay nhỏ ta cũng có thể dùng động cơ bước với các dạng rất khác nhau, cùng với mạch ĐK điện tử phân phối xung.
7.673
04/02/2017
- Bao An Automation - dẫn đầu phân phối thiết bị công nghiệp chính hãng
- Bảo An Automation - Nhà phân phối Qlight chính hãng tại Việt Nam
- Cách kiểm tra, đưa máy trở lại vận hành sau khi bị nước xâm nhập
- Bảo An phân phối đầu đọc code, máy kiểm kho Datalogic
- SMC vinh danh Bảo An là nhà phân phối vàng năm 2023
Web số dành cho sinh viên
Nhóm chủ đề











